Немецкие инженеры учат искусственный хобот захватывать предметы

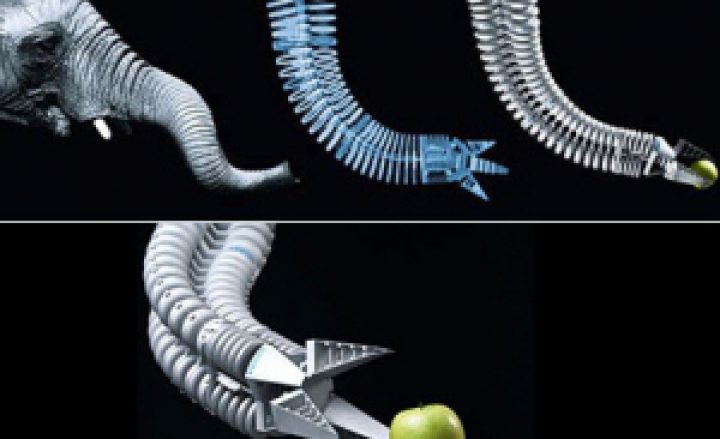 Фото: gazeta.ua
Фото: gazeta.ua
Немецкие инженеры из лаборатории Йохена Штайля создали искусственный хобот из напечатанных на 3D-принтере деталей. В 2010 году, когда разработка только появилась, программное обеспечение для управления роботом было таким, что возможности машины трудно было назвать выдающимися. Поначалу конечность, например, двигалась в нужном направлении, однако зачастую совершала движение захвата в нескольких сантиметрах от цели, передает Вести.
Однако Штайль и его коллега Матиас Рольф из университета Билефельда в Германии не сидели всё это время на месте и постепенно оптимизировали систему.
Они "обучили" алгоритм для контроля инжерного аналога хобота подобно детёнышам умных животных. Программное обеспечение робота фиксирует информацию о том, какую позицию какая часть хобота занимает при захвате. Оно идентифицирует крошечные перепады давления в тонких пневматических трубках, "питающих" искусственные мышцы. Таким образом создаётся схема, которая соотносит точное положение "мышц" хобота со степенью давления в каждой трубке.
Как рассказывает Маттиас в своём блоге, хобот также можно вручную заставить принять определённое положение, после чего робот самостоятельно воспроизведёт его по команде. Правда, сначала, он будет сопротивляться, пытаясь занять уже знакомую позицию, но затем "запомнит" и новую. Именно таким образом и происходит процесс обучения.
Полученные результаты учёные представили на Конференции по взаимодействию робота и человека, которая прошла в марте 2014 года в Билефельде.